欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227




质量和一致性
经过适当编程和优化的机器人将一致地打磨和抛光每个零件,消除了过度打磨和底切等常见的操作员错误。这减少了报废零件的数量,并提高了您送出的零件的整体质量。
生产力和效率
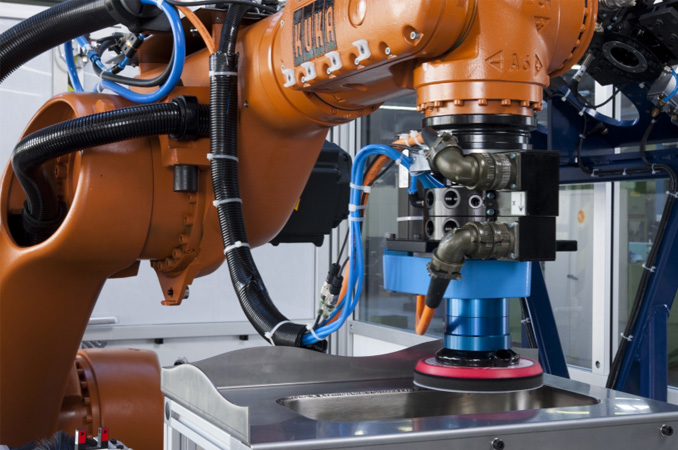
像所有形式的工业自动化(包括机器人焊接)一样,机器人打磨有助于减少生产线上的周期时间。机器人可以全天候执行焊接打磨和倒角任务,并且它们能够施加更大的力,从而在打磨过程中实现更快的切割速度。
长期成本节约
虽然实施自动化的前期成本可能很高,但在生产率和一致性方面的收益有助于确保投资收回成本。
铣削机器人和机械手可用于管道系统内部凹槽需要打磨和局部缺陷必须立即清除的各种情况。






Moravec提出了用于双目视觉图像匹配的角点检测器,而Harris提出了用于图像匹配的Harris角点算子。21世纪初,出现了大量的相关方法。2001年,提出了一种数字相移阴影技术,它只拍摄一幅图像:参考光栅线在变形物体表面上的投影。通过在其平面内移动虚拟参考光栅来计算相移.2010年,穆罕默迪提出在物体表面投射莫尔光栅;物体表面形状的变化引起光栅条纹的相位变化,并且可以提取相位的特定变化以获得物体表面的三维信息.近年来,在工业机器人和打磨相关领域也有许多应用。


表示由传感装置获得的待抛光工件的数据模板;待抛光工件的局部模板特征;通过精细配准显示B在A中的位置。配准后便于磨具规划工件的加工路线,可以大大提高加工精度。高精度匹配对于自动打磨至关重要。
上述基于2.5D局部特征信息的打磨方法,深度方向精度较低,可用于加工精度要求不高的零件。使用局部信息抛光的缺点是需要额外的步骤来获得表面信息,并且像2D方法一样,这需要从单独的特定视点进行表示。

扫一扫手机网站








 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com